Orbitron
State-of-the-art autonomous system engineered for Mars exploration

Technical Specifications
Explore Components
Click on any component to view detailed specifications and images

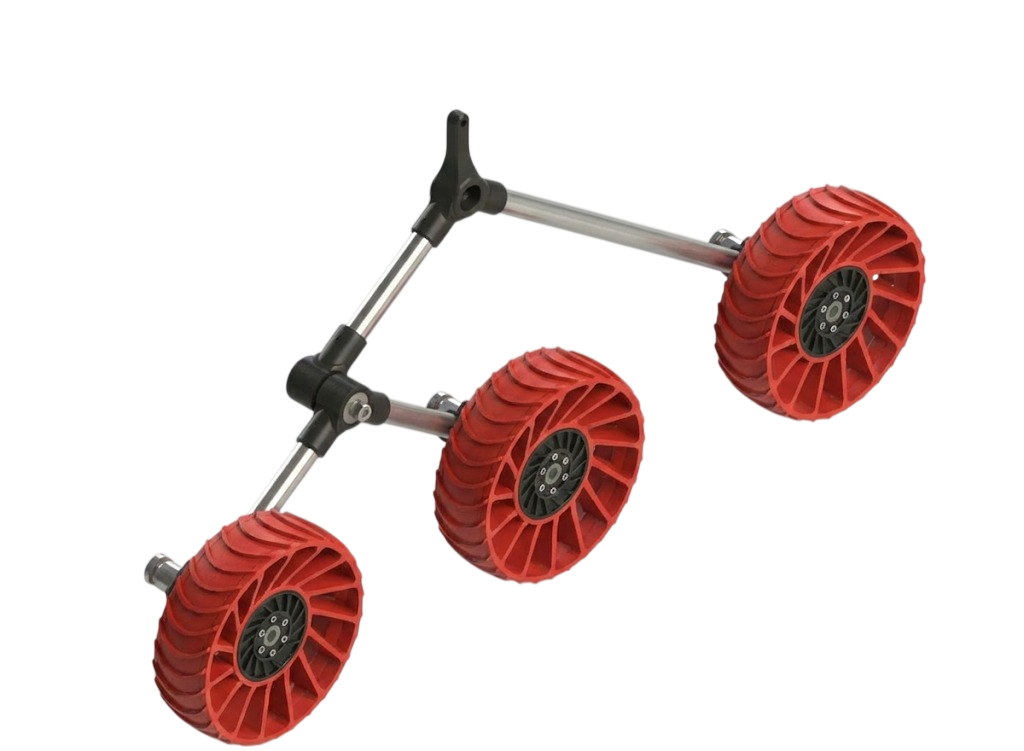
Wheels
The wheels are designed for mobility on rough terrain. The outer layer provides shock absorption, while the hub provides structural rigidity.
Key Features
- Shock absorption and traction
- High structural rigidity
- Balanced and smooth movement
- 360° rotation capability
Suspension System
The rover has a suspension system with six wheels, designed to provide stability and untroubled movement over uneven terrains. This mechanism allows the rover to overcome obstacles without significant tilt or loss of traction.
Key Features
- Even distribution of load
- High tensile strength
- Lightweight structure
- Excellent stiffness
Chassis
The body of the rover is constructed using materials that provide a strong yet lightweight frame for all components, with high strength-to-weight ratio, corrosion resistance, and ease of fabrication.
Key Features
- Strong and lightweight frame
- Corrosion resistance
- Well-organized wiring
- Balanced design
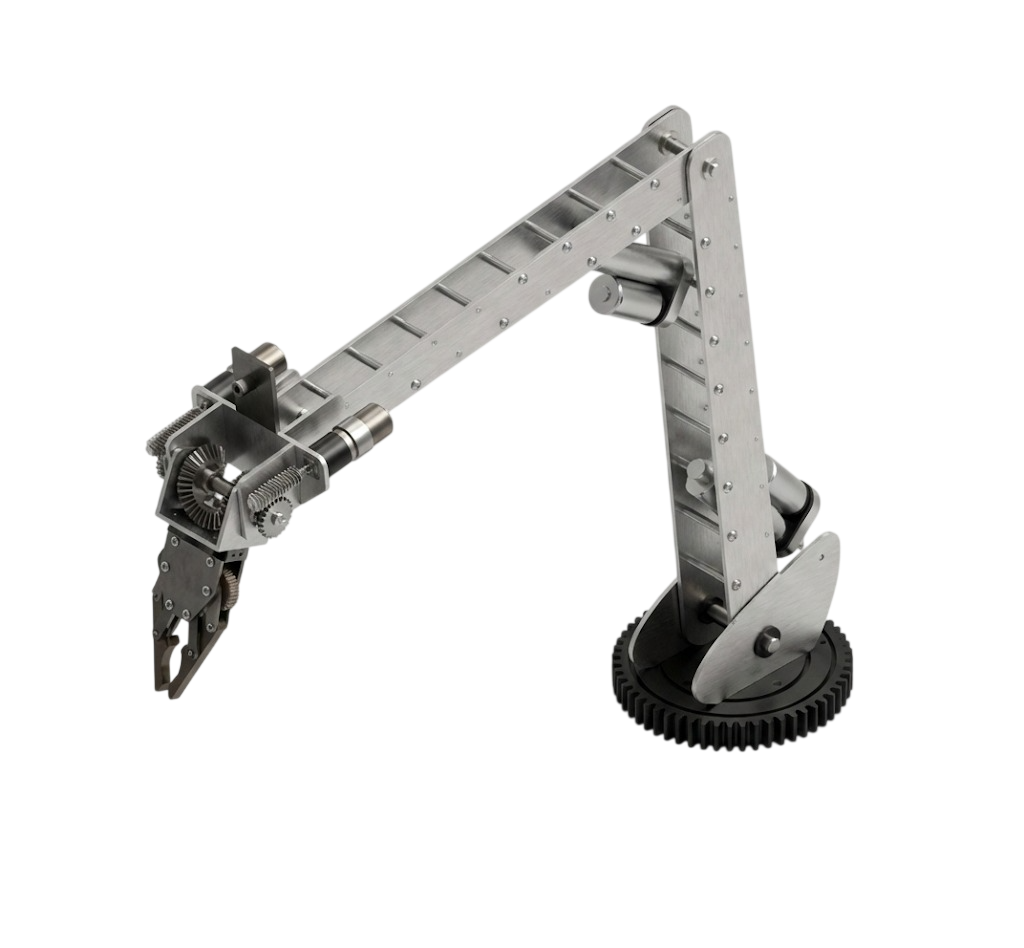
Robotic Arm
The robotic arm of the rover is made with multiple degrees of freedom to perform complex tasks such as sample collection and object manipulation with precision. The end effector features a gripper for accurate object handling.
Key Features
- High flexibility
- Wide range of motion
- Synchronized and stable control
- Secure gripping capability
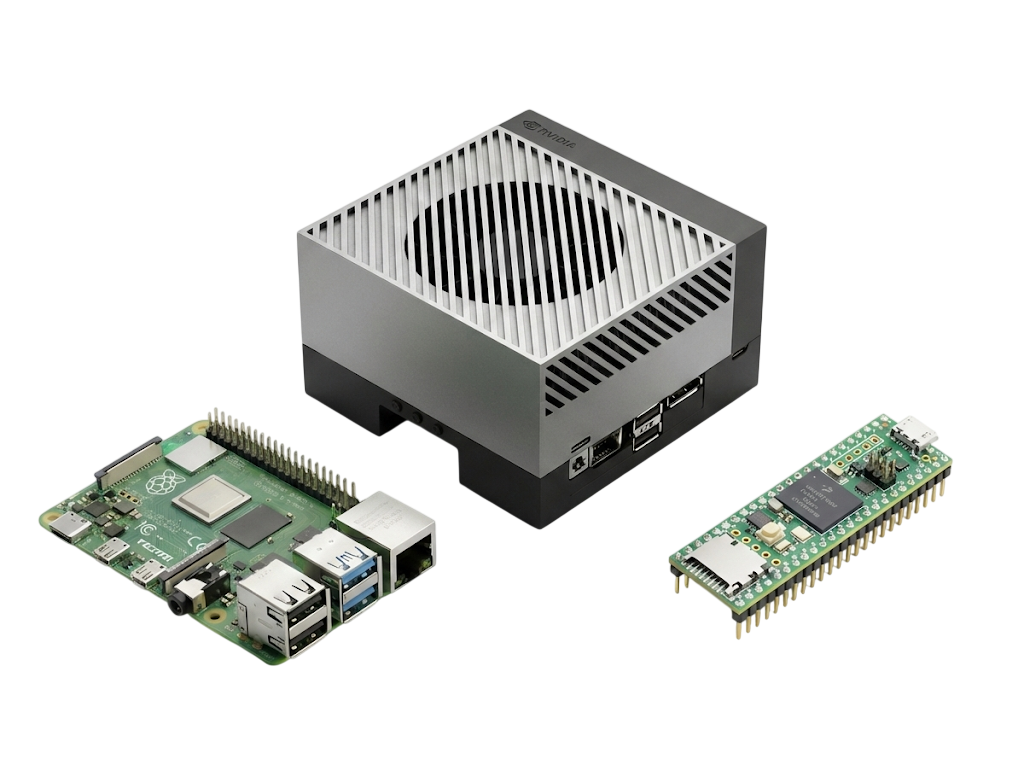
Electronics
The control system is built around a microcontroller, which handles real-time tasks such as motor control and sensor feedback. The main computer, and microcontroller work in coordination.
Key Features
- Real-time processing
- AI vision and navigation
- Data logging and command routing
- Precise low-level control
Camera Systems
The rover transmits multiple video streams to the Base Station, which are visualized through custom-built Web GUIs. The primary camera is a stereo camera.
Key Features
- Depth-perceptive view
- Top-down view of chassis
- Close-up view for grasping
- Real-time streaming
GPS
The rover is equipped with a GPS system for high-precision localization. The GPS data is a critical input for the position estimation of the rover.
Key Features
- GPS-guided missions
- Accurate environment reconstruction
- Logging GPS coordinates of objects
- Autonomous navigation to GPS coordinates
Power System
The rover runs on two separate batteries to keep the high-power and control circuits isolated. This prevents power fluctuations from affecting sensitive control components and ensures stable operation.
Key Features
- Isolated circuits
- Stable signal reference
- Handles AI and image processing
- Powers robotic arm and ABEX subsystem
The wheels are designed for mobility on rough terrain. The outer layer provides shock absorption, while the hub provides structural rigidity.
Key Features
- Shock absorption and traction
- High structural rigidity
- Balanced and smooth movement
- 360° rotation capability
The rover has a suspension system with six wheels, designed to provide stability and untroubled movement over uneven terrains. This mechanism allows the rover to overcome obstacles without significant tilt or loss of traction.
Key Features
- Even distribution of load
- High tensile strength
- Lightweight structure
- Excellent stiffness

The body of the rover is constructed using materials that provide a strong yet lightweight frame for all components, with high strength-to-weight ratio, corrosion resistance, and ease of fabrication.
Key Features
- Strong and lightweight frame
- Corrosion resistance
- Well-organized wiring
- Balanced design
The robotic arm of the rover is made with multiple degrees of freedom to perform complex tasks such as sample collection and object manipulation with precision. The end effector features a gripper for accurate object handling.
Key Features
- High flexibility
- Wide range of motion
- Synchronized and stable control
- Secure gripping capability
The control system is built around a microcontroller, which handles real-time tasks such as motor control and sensor feedback. The main computer, and microcontroller work in coordination.
Key Features
- Real-time processing
- AI vision and navigation
- Data logging and command routing
- Precise low-level control

The rover transmits multiple video streams to the Base Station, which are visualized through custom-built Web GUIs. The primary camera is a stereo camera.
Key Features
- Depth-perceptive view
- Top-down view of chassis
- Close-up view for grasping
- Real-time streaming

The rover is equipped with a GPS system for high-precision localization. The GPS data is a critical input for the position estimation of the rover.
Key Features
- GPS-guided missions
- Accurate environment reconstruction
- Logging GPS coordinates of objects
- Autonomous navigation to GPS coordinates

The rover runs on two separate batteries to keep the high-power and control circuits isolated. This prevents power fluctuations from affecting sensitive control components and ensures stable operation.
Key Features
- Isolated circuits
- Stable signal reference
- Handles AI and image processing
- Powers robotic arm and ABEX subsystem
Mission Capabilities
Astrobiology Expedition
ScienceObjective: Collect and analyze samples to identify sites capable of supporting microbial life and seek signs of extinct or extant life
Reconnaissance & Autonomous Delivery Operation
NavigationObjective: Search, locate, and autonomously deliver objects to designated GPS coordinates up to 500m away
Instrument Deployment & Maintenance Operation
ManipulationObjective: Perform precise maintenance operations and deploy instrument caches using robotic manipulators
Project Implementation & Management Assessment
EngineeringObjective: Present rover development lifecycle covering system engineering and project management aspects
Business & Partnership Plan
StrategyObjective: Develop business acumen and build partnerships with industry and academia for project development